Перекрестные роликовые подшипники QIBR были поставлены нашему клиенту в Кельне, Германия, для повышения гибкости и эффективности работы шарниров рук робота.
- Континент
- Europe
- Страна
- Germany
- Дата
- 2016-02-08
- Категории
-
Cross Roller Bearing
- Применения Robot arm joints
Продукция
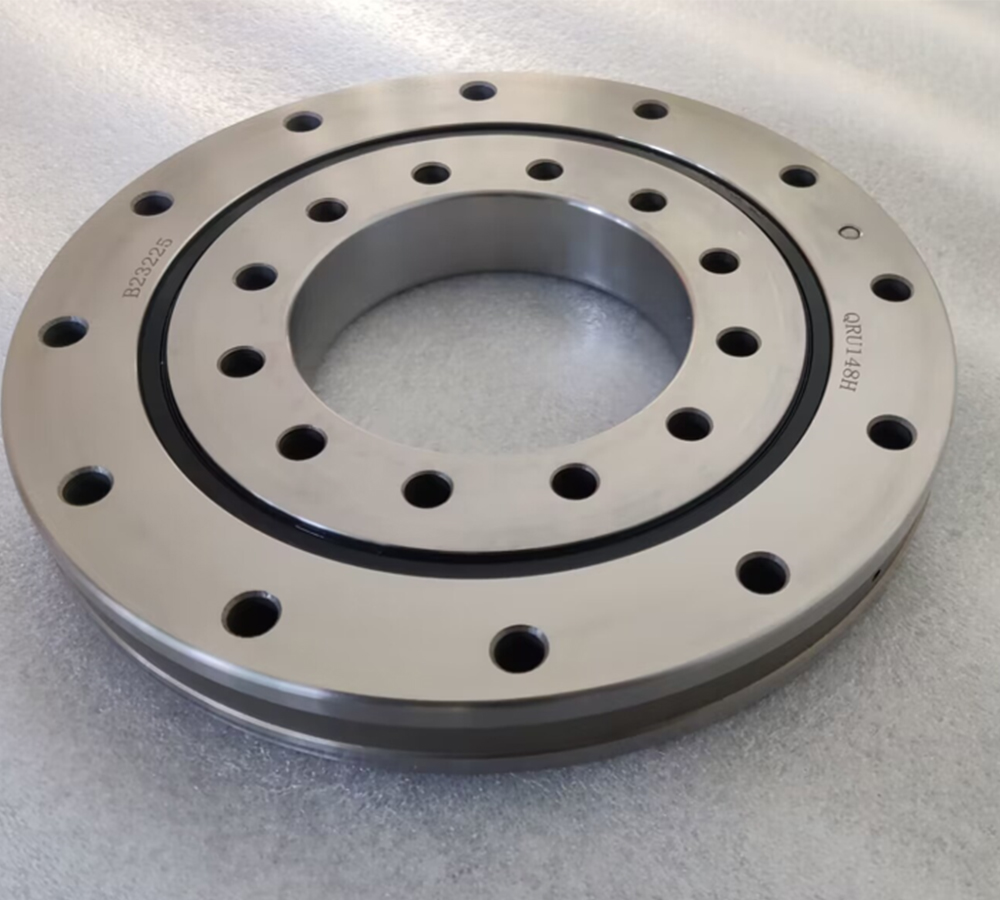
Перекрестный роликовый подшипник
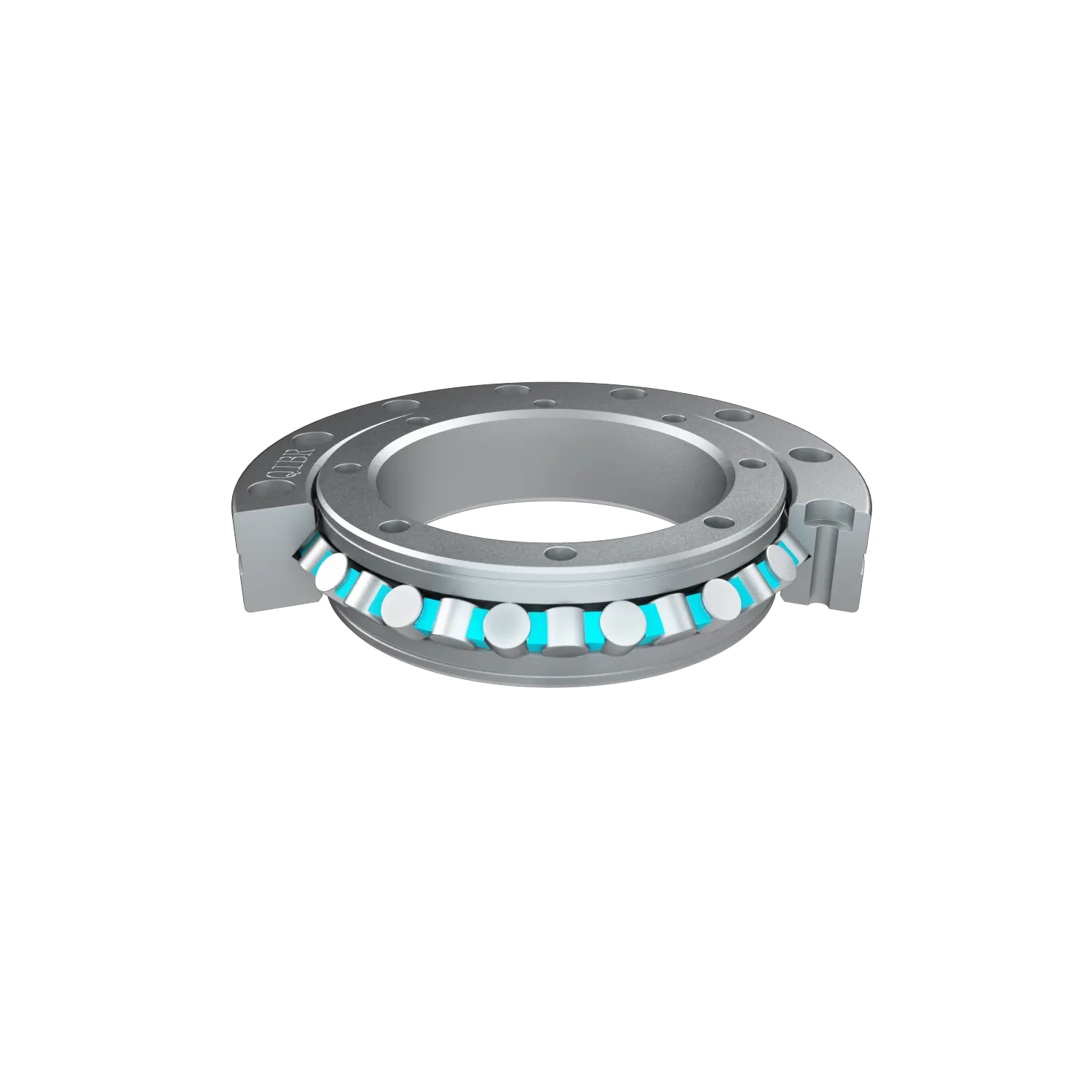
1. Высокая грузоподъемность : Тела качения перекрестного роликового подшипника QRU148 представляют собой цилиндрические ролики, расположенные крестообразно. Это позволяет одному подшипнику одновременно выдерживать разнонаправленные нагрузки, такие как радиальные, осевые и опрокидывающие моменты. Ролики расположены крест-накрест под углом 90°. Такая структура значительно повышает грузоподъемность подшипника и позволяет сохранять стабильность в условиях высоких нагрузок, что делает его пригодным для использования в шарнирах рук роботов.
2. Отличная долговечность и надежность: Перекрестный роликовый подшипник QRU148 изготовлен из высокопрочной стали, что повышает общую жесткость подшипника, благодаря чему он не будет сильно деформироваться при высоких нагрузках. Он может поддерживать хорошую стабильность и производительность, когда рука робота выполняет сложные движения.
3. Превосходная точность вращения: Точность изготовления Перекрестных Роликовых Подшипников QRU148 высока, а зазор между роликами строго контролируется в очень малом диапазоне. Малый зазор позволяет подшипнику сохранять стабильность и точность во время работы, обеспечивая высокую точность подшипника во время работы, а также точное позиционирование и управление.
Дополнительные примечания:
Немецкий заказчик решил приобрести у QIBR перекрестные роликовые подшипники QRU148 для замены подшипников NACHI, чтобы повысить гибкость и эффективность работы шарниров рук робота. Перекрестный роликовый подшипник QRU148 подходит для средне- и высокоскоростных применений. Оптимизированная структура позволяет перекрестному роликовому подшипнику QRU148 сохранять стабильные характеристики при высокой скорости вращения, удовлетворяя строгим требованиям заказчика по точности, грузоподъемности и сроку службы. Это особенно важно для движений руки робота, требующих быстрой реакции, что позволяет суставам руки робота гибко реагировать на различные задачи в динамичной среде.

Связанные Записи о Поставке Клиентов

Самоустанавливающиеся шариковые подшипники и радиальные шариковые подшипники QIBR поставляются заказчикам в Утрехт, Нидерланды, чтобы обеспечить надежность и устойчивость к высоким температурам для металлургических холодильных машин

Поворотные подшипники QIBR были поставлены заказчику в Кельне, Германия, для повышения стабильности и долговечности систем вращения солнечных батарей

Поворотные круги QIBR поставлены заказчику в Пуэбла, Мексика, для колесных кранов для повышения устойчивости и грузоподъемности

Поворотные подшипники QIBR поставлены заказчику в Берлине, Германия, для повышения устойчивости и точности козловых кранов

Подшипники скольжения QIBR поставляются заказчику в Гамбург, Германия, для штамповочных станков для повышения грузоподъемности и устойчивости

Поворотные подшипники QIBR поставляются заказчикам в Боготе, Колумбия, для повышения устойчивости и долговечности верхнего поворотного устройства экскаваторов

Поворотные подшипники QIBR были поставлены заказчику в Гааге, Нидерланды, для повышения точности и грузоподъемности высокоточных поворотных столов для станков

Поворотные подшипники QIBR поставлены заказчику в Сальвадоре, Бразилия, для повышения устойчивости и грузоподъемности козловых кранов

Подшипники скольжения и высокоточные цилиндрические роликовые подшипники QIBR были поставлены клиенту в Португалии для использования в морских двигателях для улучшения стабильной работы и долговечности.

Поворотные подшипники QIBR были поставлены заказчику в Сиднее, Австралия, для повышения несущей способности и устойчивости статических сваебойных установок.
